Dual Interaction
2023
Simulation, Motion Retargetting
Stylized Humanoid Movements, MuJoCo, Motion Capture (Xsens MVN)
Robotics
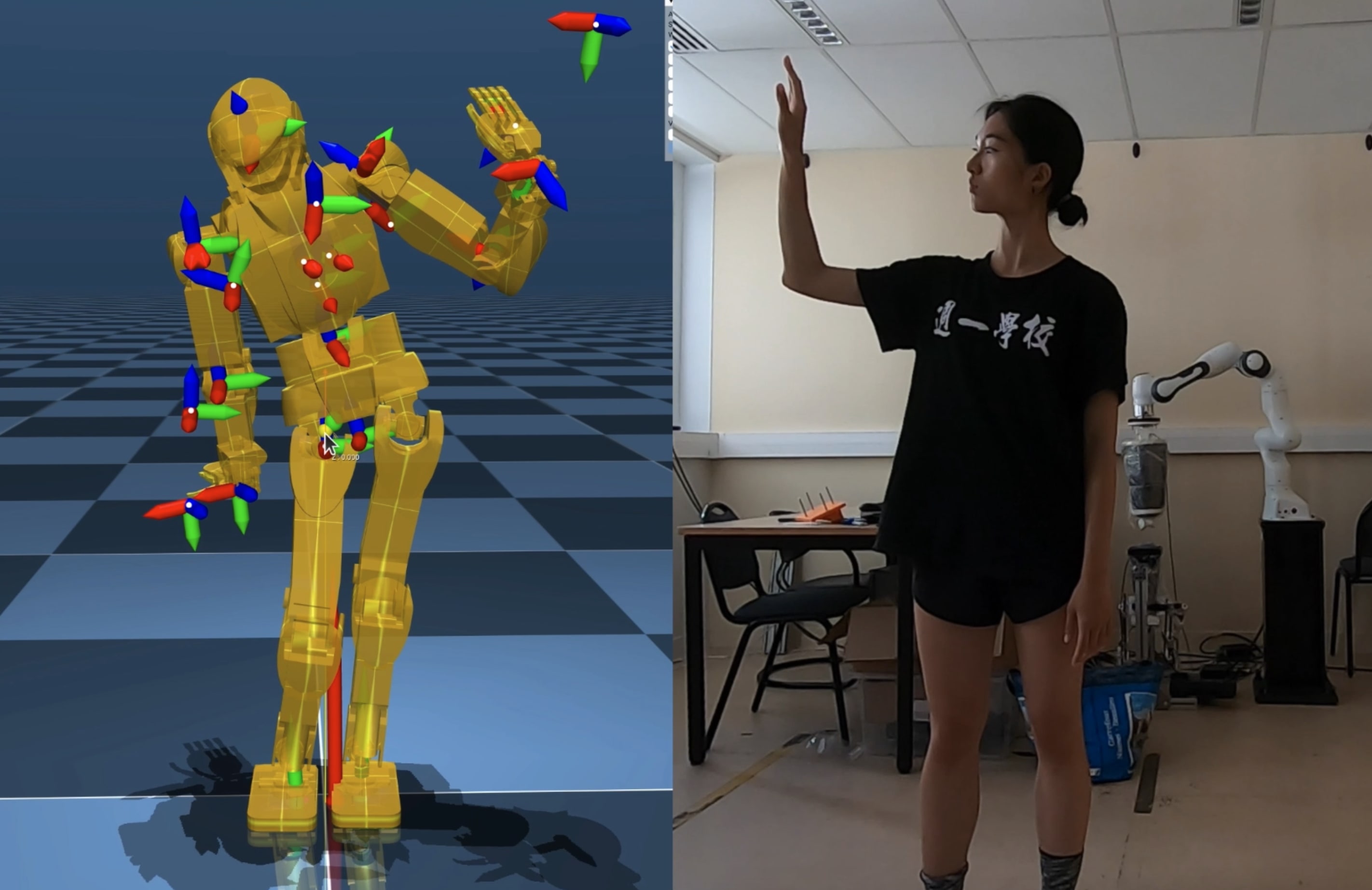
We focused on the intersection of motion capture and physics-based simulation. By developing a retargeting controller, we took raw kinematic data from an Xsens MVN suit and mapped it directly onto an HRP-4 humanoid model within MuJoCo. This allowed us to create a dialogued "dual dance" between a dancer and the simulated HRP-4. Through engineering of joint-level controllers and the tuning of physical constraints, the simulation didn't just accurately replicate human movement, it further enabled a stylized and expressive interaction with a human dancer while maintaining balance and ground contact forces. The video below demonstrates how the choreographed movements of the HRP-4 can create a poetic interaction with its human partner.

Team & Partners
- Robotics simulation|Hui-Ting Hong
- Retargeting controller|Hugo Lefèvre, Hui-Ting Hong
- Stylized movements and choreograph|Hui-Ting Hong
- Labo. INREV-AIAC, Paris 8
- LIRMM — Laboratoire d’informatique, de robotique et de microélectronique de Montpellier
official dual dance