
Whole-Body-Control, Humanoid Locomotion, Sim-to-Real
RL-based Control, ROS1/2, Python, C++, mc_rtc
Robotics
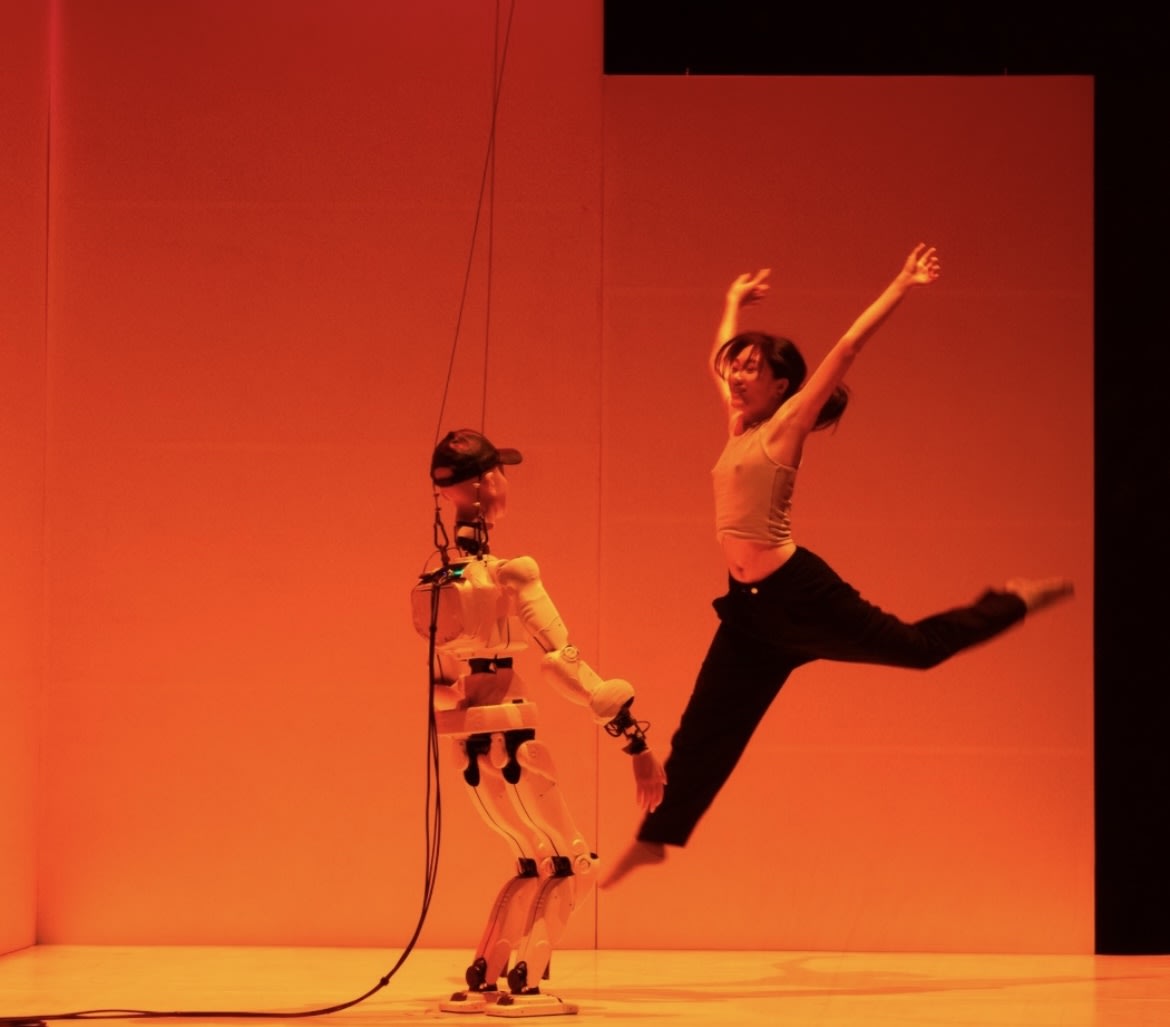
A Dance Performance with a Humanoid Robot using a Real-time Gesture Responsive Framework
Hui-Ting Hong, Chu-Yin Chen, Arnaud Tanguy, and Abderrahmane Kheddar.
IEEE RO-MAN 2024
We present a lightweight, real-time gesture responsive framework designed to investigate dynamics of human-robot interaction in live dance performances, merging aspects from choreography and robotics. In particular, it is tailored for artists to integrate human-sized humanoid robots into their dances seamlessly, offering an intuitive solution without the complexities of mastering robot control systems. Unlike existing interaction methods relying on wearable sensors or predetermined music cues, our framework, integrated in a task-space controller, enables the robot to dynamically respond to the dancer’s movements, generating unpredictable yet artistically meaningful gestures without the need for body-mounted sensors. This design choice emphasizes the artistic intention behind the improvisation, illustrating that it is not merely about creating movements spontaneously but rather a way of expression in intuition guided by perception. We assess our framework on the HRP-4 humanoid robot and the result has been successfully demonstrated in a public human-robot dance performance at the Arts Center of Enghien-les-Bains’s 23/24 season launch event, aiming to contribute to the exploration of co-creation between human and human-sized humanoid robot in improvised dance performances.

Research context
This Robotic Dance Performance was produced as a final presentation of the 3-year research-creation project “Co-Évolution, Co-Création et Improvisation Homme-Machine (CECCI-H2M)” of the EUR d’ArTeC, led by Image Numérique et Réalité Virtuelle (INREV) research team of the labo. AIAC of Université Paris 8, in collaboration with CDA d’Enghien-les-Bains and CNRS-LIRMM Interactive Digital Human (IDH) team.
Team & Partners
- Project leader|Pr. Chu-Yin Chen (Professor, lab. INREV-AIAC, Paris 8)
- Research director|Pr. Abderrahamane Kheddar (Professor/Research Director, LIRMM IDH team, CNRS)
- Director of the Enghien-les-Bains Art Center (CDA)|Dominique Roland
- Engineer for HRP-4 robot and dancer|Hui-Ting Hong (Ph.D. candidate, lab. INREV-AIAC, Paris 8)
- Computer graphics and sound|Isadora Teles de Castro (Ph.D., lab. INREV-AIAC, Paris 8)
- Engineer for HRP-4 robot|Arnaud Tanguy (research engineer, LIRMM IDH team, CNRS)
- Lighting design|Carine Gérard
- CDA team, coordination with EUR ArTeC|Victoria Chavez and Driss Nicolle
- Also accompanied by|the Casa 9 association and the CDA technical team
- Labo. INREV-AIAC, Paris 8
- CDA — Centre des Arts d’Enghien-les-Bains
- LIRMM — Laboratoire d’informatique, de robotique et de microélectronique de Montpellier
official trailer